
 Цыганаш Андрей Павлович, 9 "В" класс, КГУ "Гимназия № 24 отдела образования акимата города Тараза", Республика Казахстан, Жамбыльская область, город Тараз.
Цыганаш Андрей Павлович, 9 "В" класс, КГУ "Гимназия № 24 отдела образования акимата города Тараза", Республика Казахстан, Жамбыльская область, город Тараз.
 Научный руководитель: Куцева Альфия Анатольевна, учитель информатики, КГУ "Гимназия № 24 отдела образования акимата города Тараза", Республика Казахстан, Жамбыльская область, город Тараз.
Научный руководитель: Куцева Альфия Анатольевна, учитель информатики, КГУ "Гимназия № 24 отдела образования акимата города Тараза", Республика Казахстан, Жамбыльская область, город Тараз.
В настоящее время робототехника превратилась в развитую отрасль промышленности: тысячи роботов работают на различных предприятиях мира, подводные манипуляторы стали непременной принадлежностью подводных исследовательских и спасательных аппаратов, изучение космоса опирается на широкое использование роботов с различным уровнем интеллекта. Особенное внимание уделяется автоматизации тяжелых, вредных, утомительных и монотонных работ в различных отраслях с помощью роботов-манипуляторов.
Привлечение школьников к исследованиям робототехники, обмену технической информацией и начальными инженерными знаниями, развитию новых научно-технических идей позволит создать необходимые условия для высокого качества образования, за счет использования в образовательном процессе новых педагогических подходов и применение новых информационных и коммуникационных технологий. Понимание феномена технологии, знание законов техники, позволит выпускнику школы соответствовать запросам времени и найти своё место в современной жизни.
Выбор проекта «Деревянные модели автомобилей» обусловлен интересом юношей к технике и автомобилям в частности. Воплощение моделей в дереве посредством столярного мастерства, развивает профессиональные навыки, помогает глубже на практике изучить и закрепить знания, получаемые на уроках профессионально – трудового обучения, развивает творчество, умение терпеливо и кропотливо достигать, поставленной перед собой цели.
Актуальность темы: заключается в том, что на временном этапе развития современной машиностроительной индустрии остро стоит вопрос о безопастности движения как пешеходов, так и самих машин. Проблема автоматического торможения широко рассматриваются как со стороны программного обеспечения так и со стороны аппаратного обеспечения. Проект предлагает минимальное решение данной проблемы, использование на базе конструкции деревянной машины оснащенной андруино нано и специальных датчиков выполняет автоматическое торможение.
Объект исследования: различное программное и аппаратное обеспечение для создания машины с искусственным интеллектом автоматического торможения.
Задачи исследования:
получить новые возможности развивать потенциальные способности для автоматического торможения автомоделей.
Методы исследования: Для решения поставленных в проекте задач применяли следующие методы: теоретический - анализ литературы, архивных материалов, документации и продуктов деятельности; исследовательский - изучение языка С++ и программирования Arduino; метод моделирования - созданию материальной модели, увеличение функциональности моделей за счет применения функциональных датчиков.
В результате проделанной работы получен продукт – модель деревянной машины с устройством автоматического торможения.
Практическая значимость заключается в изучении использования различного программного и аппаратного обеспечения для создания машины с искусственным интеллектом автоматического торможения. Результаты работы новы и интересны и смогут использоваться другими пользователями.
Практическая значимость заключается в изучении использования различного программного и аппаратного обеспечения для создания машины с искусственным интеллектом автоматического торможения. Результаты работы новы и интересны и смогут использоваться другими пользователями.
Этапы исследования: первый этап ислледования состоит из анализа программного обеспечения и аппаратного обеспечения, с помощью литературы предосталенных самими разработчиками.
Второй этап изучение и анализ приемов моделирования.
Третий этап практическое применение полученных знаний, на примере создания материальной модели с автоматическим тормажением, для использования в различных сферах деятельности человека.
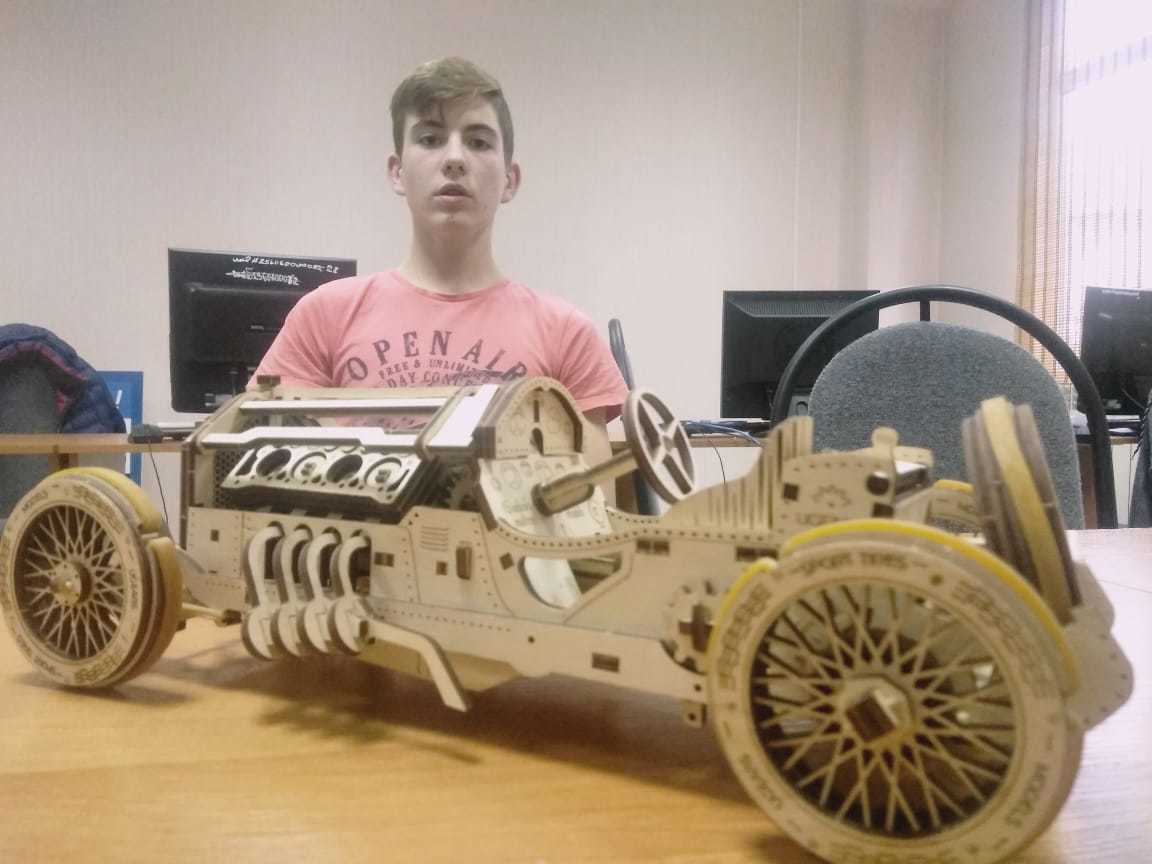
__f1865_01.jpg)
Этот вид деревянного автомобиля был собран из конструкции model"U-9 Grand Prix Cfr" ucears купленной через интернет магазин. Участник проекта собрал машину самостоятельно используя инструкцию сборки.
__f1866_5a.jpg)
Выбор «Деревянные модели автомобилей» обусловлен интересом юношей к технике и автомобилям в частности. Воплощение моделей в дереве посредством столярного мастерства, развивает профессиональные навыки, помогает глубже на практике изучить и закрепить знания, получаемые на уроках, развивает творчество, умение терпеливо и кропотливо достигать, поставленной перед собой цели.
Эти масштабные модели автомобилей кажутся очень, очень хрупкими. Первая мысль, возникающая при взгляде на модели, — как это сделано? Как можно выточить два десятка полумиллиметровых дверных петель, вставить в них еще более тон кий штифт и заставить эту дверь открываться? Как можно выточить шестерни сцепления и соединить их с трансмиссией, если диаметр каждой шестерни не превышает нескольких миллиметров? При том, что все это не стальное, а деревянное, почти невесомое и требующее нечеловеческой точности в расчетах и обработке.
Модель автомобиля выполнена в масштабе 1:24, и в ней движется — без преувеличения — всё. Капот открывается и складывается, жалюзи на нем поворачиваются, открываются двери (причем работают даже дверные замки — чтобы открыть, нужно повернуть рукоятку на бамбуковой пружине), двигается рычаг ручного тормоза, подвеска прогибается под собственным весом модели. Если проворачивать задние колеса, срабатывает привод через карданный вал (косые шестерни), движется коленвал двигателя, вращается вентилятор. Рулевое управление также детализировано, выдержано даже передаточное отношение: на два поворота руля — полный поворот передних колес. Снимается крыша, выдвигаются ящички и бардачки в салоне, движутся дворники, откидываются дополнительные сиденья.
Но дело не только в подвижных элементах — неподвижные тоже поражают своей точностью.
Если при первом взгляде на модели автомобилей единственное возникающее чувство — это восхищение, смешанное с удивлением, то при втором появляются технические вопросы. Например: не каждое дерево достаточно мелко, дисперсно, многие сорта не способны сохранять твердость при подобном «измельчении». Какие сорта использует мастер? Самые разные: черное дерево, палисандр, родезийский тик, граб, орех, самшит, сливу, яблоню, бамбук, грушу, вишню, бук, древесину грецкого ореха, красное дерево.
Изготовление деревянных моделей автомобилей развивает профессиональное мастерство, умение владеть различными инструментами, дает дополнительные навыки в черчении, конструировании и рисовании, формирует творческие способности ученика.
Знакомство учащихся с принципами и методами разработки, конструирования и программирования управляемых электронных устройств на базе контроллера
Повышение мотивации к обучению предметов физика, информатика, математика
Arduino - это семейство электронных платформ, предназначенных для изучения проектирования электроники.
Arduino Nano входит в тройку самых популярных плат ардуино. Она позволяет создавать компактные устройства, использующие тот же контроллер, что и в Arduino Uno. В этой статье мы рассмотрим плату поближе: разберемся с распиновкой платы, узнаем особенности подключения и сделаем краткий обзор шилдов и плат расширения для Nano.
Arduino NANO - компактная платформа для прототипирования микроэлектронных устройств, предназначенная для использования с макетной платой. Функционал устройства во многом схож с Arduino UNO и отличается от нее лишь размерами платы и отсутствием отдельного разъема для питания.
Основа Arduino Nano - микроконтроллер на базе ATmega328, логическая микросхема для обработки данных с тактовой частотой 16 МГц, имеющая на борту 8 аналоговых и 14 цифровых контактов общего назначения, а также все необходимые интерфейсы: I2C, SPI и UART.
Arduino является платформой с открытой архитектурой и программным обеспеченем. Arduino Nano - идеальный инструмент, способный показать, насколько легким может стать процесс изучения электроники, схемотехники и программирования. За счет своих компактных размеров АРДУИНО НАНО помещается вместе с датчиками и сенсорами на одной макетной плате.
Имеются ограничения по напряжению и току на входы и выходы платы. Все цифровые и аналоговые контакты работают в диапазоне от 0 до 5 В. При подаче питания, выходящего за рамки этих значений, напряжение будет ограничиваться защитными диодами. В этом случае сигнал должен подключаться через резистор, чтобы не вывести контроллер из строя. Наибольшее значение втекающего или вытекающего тока не должно превышать значение 40 мА, а общий ток контактов должен быть не более 200 мА.
На плате имеются 4 светодиода, которые показывают состояние сигнала. Они обозначены как TX, RX, PWR и L. На первых двух светодиод загорается, когда уровень сигнала низкий, и показывает, что сигнал TX или RX активен. Светодиод PWR загорается при напряжении в 5 В и показывает, что подключено питание. Последний светодиод – общего назначения, загорается, когда подается высокий сигнал.
Имеются ограничения по напряжению и току на входы и выходы платы. Все цифровые и аналоговые контакты работают в диапазоне от 0 до 5 В. При подаче питания, выходящего за рамки этих значений, напряжение будет ограничиваться защитными диодами. В этом случае сигнал должен подключаться через резистор, чтобы не вывести контроллер из строя. Наибольшее значение втекающего или вытекающего тока не должно превышать значение 40 мА, а общий ток контактов должен быть не более 200 мА.
На плате имеются 4 светодиода, которые показывают состояние сигнала. Они обозначены как TX, RX, PWR и L. На первых двух светодиод загорается, когда уровень сигнала низкий, и показывает, что сигнал TX или RX активен. Светодиод PWR загорается при напряжении в 5 В и показывает, что подключено питание. Последний светодиод – общего назначения, загорается, когда подается высокий сигнал.
__f1867_9e.jpg)
1.2.2.ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Технические характеристики Arduino Nano:
1.2.3.РАСПИНОВКА ARDUINO NANO
__f1868_9a.jpg)
1 пин — TX (передача данных UART), D0.
2 — RX (прием данных UART), D1. RX и TX могут использоваться для связи по последовательному интерфейсу или как обычные порты данных.
3, 29 – сброс.
4, 29 – земля.
5 – D2, прерывание INT0.
6 – D3, прерывание INT1 / ШИМ / AIN0.
7 – D4, счетчик T0 / шина I2C SDA / AIN1. AIN0 и AIN1 – входы для быстродействующего аналогового компаратора.
8 – D5, счетчик T1 / шина I2C SCL / ШИМ.
9 – 16 – порты D6-D13, из которых D6 (9й), D9 (12й), D10 (13й) и D11 (14й) используются как выходы ШИМ. D13 (16й пин) — светодиод. Также D10 – SS, D11 – MOSI, D12 – MISO, D13 – SCK используются для связи по интерфейсу SPI.
18 – AREF, это опорное напряжение для АЦП микроконтроллера.
19 – 26: аналоговые входы A0… A7. Разрядность АЦП 10 бит. A4 (SDA), A5 (SCL) – используются для связи по шине I2C. Для создания используется специальная библиотека Wire.
Микроконтроллеры обладают большими функциональными возможностями, но у них есть один недостаток – это ограниченное число выводов. Поэтому на этапе составления схемы устройства следует продумать, каким образом можно максимально упростить проект, чтобы сократить число нужных для подключения контактов.
1.2.4.ПОДКЛЮЧЕНИЕ ARDUINO NANO
УСТАНОВКА ДРАЙВЕРА ДЛЯ CH340
Микросхема CH340 часто используется в платах Ардуино со встроенным USB-to-Serial преобразователем. Она позволяет уменьшить затраты на производство плат, не влияя на ее работоспособность. При помощи этого программатора можно легко прошивать платы Ардуино. Для того, чтобы начать работать с этой микросхемой, нужно установить драйвер на компьютер.
Установка выполняется в несколько этапов:
Скачивание архива с драйвером для нужной операционной системы. Для Windows, MacOS и Linux загрузить драйверы можно по ссылке http://iarduino.ru/file/230.html
Распаковка архива.
Поиск файла SETUP.EXE, его запуск.
На мониторе появится окно, в котором нужно нажать кнопку Install. Установка драйвера начнется, после чего можно начинать работу со схемой.
Настройка Arduino IDE
Стандартная среда разработки Arduino IDE используется для работы всех видов Ардуино с компьютером. Чтобы начать работу, нужно сначала скачать Arduino IDE с официального сайта и установить ее. Удобнее скачивать Windows Installer, особенно если среда разработки будет установлена на постоянном рабочем компьютере. Если скачан архив, то его нужно распаковать и запустить файл Arduino.exe.
Как только среда установлена, нужно ее запустить. Для этого нужно подключить к компьютеру саму плату Ардуино через USB. Затем перейти в меню Пуск >> Панель управления >> Диспетчер устройств, найти там Порты COM и LPT. В списке появится установленная плата и указан номер порта, к которому подключается плата. После этого нужно запустить Arduino IDE, перейти в меню Инструменты >> Порт, и указать порт, к которому присоединена Ардуино. В меня Инструменты>> Платы нужно выбрать модель подключенной платы, в данном случае Arduino Nano. На этом установка и настройка закончены, и можно создавать программу. Важно помнить, что если к компьютеру будет подключаться другая плата, настройки снова нужно будет поменять на соответствующее устройство.
__f1869_a3.png)
ПРАКТИЧЕСКАЯ ЧАСТЬ ПРОЕКТА
2.УСТРОЙСТВО ПРИМЕНЯЕМЫЕ В ПРОЕКТЕ
2.1. УЛЬТРАЗВУКОВОЙ ДАЛЬНОМЕР HC-SR04
Дальномер — это устройство для измерения расстояния до некоторого предмета. Дальномер помогает роботам в разных ситуациях. Простой колесный робот может использовать этот прибор для обнаружения препятствий. Летающий дрон использует дальномер для баражирования над землей на заданной высоте. С помощью дальномера можно даже построить карту помещения, применив специальный алгоритм SLAM.
__f1870_d8.jpg)
Принцип действия
На этот раз мы разберем работу одного из самых популярных датчиков — ультразвукового (УЗ) дальномера. Существует много разных модификаций подобных устройств, но все они работают по принципу измерения времени прохождения отраженного звука. То есть датчик отправляет звуковой сигнал в заданном направлении, затем ловит отраженное эхо и вычисляет время полета звука от датчика до препятствия и обратно.
__f1871_3f.jpg)
Из школьного курса физики мы знаем, что скорость звука в некоторой среде величина постоянная, но зависящая от плотности среды. Зная скорость звука в воздухе и время полета звука до цели, мы можем рассчитать пройденное звуком расстояние по формуле:
s = v*t
где v — скорость звука в м/с, а t — время в секундах. Скорость звука в воздухе, кстати, равна 340.29 м/с.
Чтобы справиться со своей задачей, дальномер имеет две важные конструктивные особенности. Во-первых, чтобы звук хорошо отражался от препятствий, датчик испускает ультразвук с частотой 40 кГц. Для этого в датчике имеется пьезокерамический излучатель, который способен генерировать звук такой высокой частоты. Во-вторых, излучатель устроен таким образом, что звук распространяется не во все стороны (как это бывает у обычных динамиков), а в узком направлении. На рисунке представлена диаграмма направленности типичного УЗ дальномера.
__f1872_17.jpg)
Как видно на диаграмме, угол обзора самого простого УЗ дальномера составляет примерно 50-60 градусов. Для типичного варианта использования, когда датчик детектирует препятствия перед собой, такой угол обзора вполне пригоден. Ультразвук сможет обнаружить даже ножку стула, тогда как лазерный дальномер, к примеру, может её не заметить.
Если же мы решим сканировать окружающее пространство, вращая дальномер по кругу как радар, УЗ дальномер даст нам очень неточную и шумную картину. Для таких целей лучше использовать как раз лазерный дальномер.
Также следует отметить два серьезных недостатка УЗ дальномера. Первый заключается в том, что поверхности имеющие пористую структуру хорошо поглощают ультразвук, и датчик не может измерить расстояние до них. Например, если мы задумаем измерить расстояние от мультикоптера до поверхности поля с высокой травой, то скорее всего получим очень нечеткие данные. Такие же проблемы нас ждут при измерении дистанции до стены покрытой поролоном.
Второй недостаток связан со скоростью звуковой волны. Эта скорость недостаточно высока, чтобы сделать процесс измерения более частым. Допустим, перед роботом есть препятствие на удалении 4 метра. Чтобы звук слетал туда и обратно, потребуется целых 24 мс. Следует 7 раз отмерить, прежде чем ставить УЗ дальномер на летающих роботов.
Подключение HC-SR04
(Vcc) еще есть Trig и Echo. Оба этих вывода цифровые, так что подключаем из к любым выводам АрдуиноУно:
|
HC-SR04 |
GND |
VCC |
Trig |
Echo |
|
ArduinoUno |
GND |
+5V |
3 |
2 |
__f1873_c1.jpg)
Программирование
Итак, попробуем приказать датчику отправить зондирующий ультразвуковой импульс, а затем зафиксируем его возвращение. Посмотрим как выглядит временная диаграмма работы HC-SR04.
__f1874_e9.png)
На диаграмме видно, что для начала измерения нам необходимо сгенерировать на выводе Trig положительный импульс длиной 10 мкс. Вслед за этим, датчик выпустит серию из 8 импульсов и поднимет уровень на выводе Echo, перейдя при этом в режим ожидания отраженного сигнала. Как только дальномер почувствует, что звук вернулся, он завершит положительный импульс на Echo.
Получается, что нам нужно сделать всего две вещи: создать импульс на Trig для начала измерения, и замерить длину импульса на Echo, чтобы потом вычислить дистанцию по нехитрой формуле. Делаем.
intechoPin = 2;
inttrigPin = 3;
voidsetup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
voidloop() {
intduration, cm;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
cm = duration / 58;
Serial.print(cm);
Serial.println(" cm");
delay(100); }
Функция pulseIn замеряет длину положительного импульса на ноге echoPin в микросекундах. В программе мы записываем время полета звука в переменную duration. Как мы уже выяснили ранее, нам потребуется умножить время на скорость звука:
s = duration * v = duration * 340 м/с
Переводим скорость звука из м/с в см/мкс:
s = duration * 0.034 м/мкс
Для удобства преобразуем десятичную дробь в обыкновенную:
s = duration * 1/29 = duration / 29
А теперь вспомним, что звук прошел два искомых расстояния: до цели и обратно. Поделим всё на 2:
s = duration / 58
Теперь мы знаем откуда взялось число 58 в программе!
Загружаем программу на АрдуиноУно и открываем монитор последовательного порта. Попробуем теперь наводить датчик на разные предметы и смотреть в мониторе рассчитанное расстояние.
2.2.ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ИЗЛУЧАТЕЛЬ
Излучатели звука(звукоизлучатели,громкоговорители,телефоны,драйверы) – технические устройства, предназначенные для возбуждения звуковых волн в различных средах путем преобразования электрического сигнала в энергию звукового поля.
Пьезоэлектри́ческийизлуча́тель, пьезоизлуча́тель — электроакустическое устройство, способное воспроизводить звук, либо излучать ультразвук, благодаря обратному пьезоэлектрическому эффекту.
Пьезоэлектрический излучатель состоит из элемента, обладающего пьезоэлектрическими свойствами, электродов и в ряде случаев держателей. Эти излучатели обычно используются в диапазоне ультразвуковых частот до 3 - 6 Мгц.
Для программирование Пьезоэлектрического излучателя используются две новые функции:
tone (<номер порта>,<часто>)
noTone(<номер порта>);
__f1875_68.jpg)
__f1876_0d.jpg)
Скетч:
intSoundPin = 8; //Объявляем переменную, к которой подключен пинпьезоизлучателя
intDelaySound = 1000; //Пауза 1 секунда
voidsetup() {
}
voidloop() {
tone(SoundPin, 1915);
delay(DelaySound);
tone(SoundPin, 1700);
delay(DelaySound);
tone(SoundPin, 1519);
delay(DelaySound);
tone(SoundPin, 1432);
delay(DelaySound);
tone(SoundPin, 1275);
delay(DelaySound);
tone(SoundPin, 1136);
delay(DelaySound);
tone(SoundPin, 1014);
delay(DelaySound);
noTone(7);
}
2.3.СВЕТОДИОД И ПРИНЦИП ЕГО РАБОТЫ
Светодиод – это специальный электроприбор, который перерабатывает ток в некоторое свечение. На сегодняшний день светодиоды более известны как LED, что значит «светоизлучающий диод.
__f1877_f3.jpg)
Прибор является полупроводниковым и состоит из кристалла-чипа, корпуса, контактных выводов и оптического устройства. Свет исходит от кристалла, а его цвет может быть различным и зависит от применяемого материала. Яркость светодиода, как и его цвет, также может быть различной. Так, например, для большего светового эффекта в одну лампу часто вставляют несколько кристаллов, вырабатывающих однотонный свет, который в комплексе образует яркое свечение.
__f1878_d9.jpg)
Яркость устройства напрямую зависит от силы подаваемого на него электрического тока. В свою очередь, слишком мощный поток электроэнергии вызывает быстрый перегрев внутреннего кристалла и выводит его из строя. Ввиду этого конструкция светодиода несколько затратна по стоимости материалов, что несколько негативно сказывается на выборе таких ламп. По яркости светодиоды принято делить на категории: ультраяркие, их минимальная мощность – 1 W; светодиоды повышенной яркости – достигают 20 mW; стандартные лампы. На сегодняшний день широко применяется блок светодиодов, который встраивается в лампу. Благодаря ему возможна регулировка яркости и выбор оптимального режима свечения.
Светодиод – это лучший на сегодняшний день выбор типа освещения, который имеет ряд преимуществ:
2.4. НАЗНАЧЕНИЕ ДВИГАТЕЛЯ AРДУИНО И ПРИНЦИП РАБОТЫ
PWM или широтно-импульсная модуляция – это метод, позволяющий нам скорректировать среднее значение напряжения, которое поступает на электронное устройство, путем быстрого включения и выключения питания. Среднее напряжение зависит от рабочего цикла или количества времени, в течение которого сигнал включен, в зависимости от времени, в течение которого сигнал выключен за один промежуток времени.
__f1879_d8.jpg)
Поэтому, в зависимости от размера прибора, мы можем просто подключить выход PWM Arduino к базе транзистора или к затвору MOSFET и управлять скоростью двигателя, контролируя выход PWM. Сигнал PWM с низким уровнем мощности Arduino включает и выключает затвор на MOSFET, через который приводится прибор высокой мощности. Ардуино GND и источник питания двигателя GND должны быть соединены вместе.
2.4.1.СБОРКА ДВИГАТЕЛЯ
Транзистор – это электрический выключатель, который активирует цифровые контакты или пины микропроцессора Aрдуино. В этом примере он управляется выводом 9, таким же образом, как и светодиод, за исключением того, что транзистор включает и выключает схему приспособления.
__f1880_5d.jpg)
 Эта схема работает, но она по-прежнему создает обратный ток из-за импульса прибора, по мере его замедления, или из-за того, что двигатель повернется другой стороной. Если генерируется обратный ток, он перемещается с отрицательной стороны и пытается найти простой путь к земле.
Эта схема работает, но она по-прежнему создает обратный ток из-за импульса прибора, по мере его замедления, или из-за того, что двигатель повернется другой стороной. Если генерируется обратный ток, он перемещается с отрицательной стороны и пытается найти простой путь к земле.
Маршрут проходит через транзистор или платформу, описанную выше. Невозможно точно вычислить, что произойдет, поэтому необходимо обеспечить способ контроля избыточного тока.
__f1881_24.jpg)
Чтобы обеспечить полную безопасность устройства, устанавливается диод через прибор. Диод обращен к источнику напряжения, это означает, что напряжение подается через устройство. Если ток генерируется в противоположном направлении, он блокируется от поступления в микропроцессор.
Для питания прибора подается 5V через него, а затем на землю. Это напряжение вращает устройства, но пользователь контролирует его. Чтобы передать Arduino управление мощностью прибора и, следовательно, вращение, устанавливается транзистор сразу после мотора.
Значения драйвера в составе устройства и работа с ним
L298N – это двойной драйвер H-Bridge, который позволяет одновременно управлять скоростью и направлением двух приспособлений постоянного тока. Модуль может приводить в действие приборы постоянного тока с напряжением от 5 до 35 В с пиковым током до 2А.
Давайте подробнее рассмотрим распиновку модуля L298N и объясним, как это работает. Модуль имеет два винтовых клеммных блока для A и B и еще одну винтовую клеммную колодку для заземляющего контакта, VCC для двигателя и вывод 5 В, который может быть либо входом, либо выходом.
__f1882_cc.jpg)
Это зависит от напряжения, используемого на двигателях VCC. Модуль имеет встроенный 5V-регулятор, который либо включен, либо выключен с помощью перемычки. Если напряжение питания двигателя до 12 В, мы можем включить регулятор 5V, а вывод 5V можно использовать в качестве выхода, например, для питания платы Arduino. Но если напряжение двигателя больше 12 В, мы должны отключить перемычку, поскольку эти напряжения могут повредить встроенный регулятор 5 В. В этом случае вывод 5V будет использоваться в качестве входного сигнала, так как мы должны подключить его к источнику питания 5 В, чтобы IC работал правильно.
Здесь можно отметить, что эта ИС уменьшает падение напряжения примерно на 2 В. Так, например, если мы используем источник питания 12 В, напряжение на клеммах двигателей будет составлять около 10 В, а это означает, что мы не сможем получить максимальную скорость от нашего 12-вольтового двигателя постоянного тока.
Далее следуют логические управляющие входы. Для включения и управления скоростью двигателя используются кнопки включения и включения B. Если на этом контакте имеется перемычка, двигатель будет включен, и работать с максимальной скоростью, и если мы удалим перемычку, мы сможем подключить вход ШИМ к этому выводу и, таким образом, контролировать скорость двигателя. Если мы подключим этот контакт к заземлению, двигатель отключится.
Затем штифты Input 1 и Input 2 используются для управления направлением вращения двигателя A, а входы 3 и 4 – для двигателя B. Используя эти контакты, мы фактически управляем переключателями H-Bridge внутри IC L298N. Если вход 1 LOW, а вход 2 – HIGH, приспособление будет двигаться вперед, и наоборот, если вход 1 HIGH, а вход 2 LOW, агрегат будет двигаться назад. Если оба входа одинаковы, либо LOW, либо HIGH, прибор остановится. То же самое относится ко входам 3,4 прибора B.
Установка программного обеспечения
Постройте схему, как показано на рисунке, и откройте новый эскиз Arduino. Выберите кнопку «Сохранить» и сохраните эскиз с запоминающимся именем, например myMotor; введите следующий код:
int motorPin = 9;
void setup (){
pinMode (motorPin, OUTPUT );
}
void loop () {
digitalWrite (motorPin, HIGH);
delay(1000);
digitalWrite (motorPin, LOW );
delay(1000);
После того, как вы набрали эскиз, сохраните его и нажмите кнопку «Скомпилировать», чтобы проверить свой код. Arduino Environment проверяет ваш код на любые синтаксические ошибки (грамматику для вашего кода) и выделяет их в области сообщений. Наиболее распространенные ошибки включают опечатки, отсутствующие точки с запятой и чувствительность к регистру.
Если эскиз скомпилирован правильно, нажмите «Загрузить», чтобы загрузить эскиз на микропроцессор. Вы должны видеть, что ваш двигатель вращается в течение одной секунды и останавливается в течение одной секунды.
Для начала соединяем провода для питания и земли. На иллюстрации красный означает мощность, а черный означает заземление; они соединяются с двумя длинными вертикальными рядами на стороне макета. Это обеспечивает доступ к источнику питания и напряжению на 5 вольт.
Помещаем кнопку на макет, оседлав центр. Провод соединяет цифровой контакт 2 с одной ногой кнопки. Ножка кнопки, не подключенная к плате Aрдуино, должна быть подключена к источнику питания на 5 вольт.
